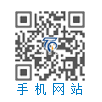
为了满足日益增长的食品、饮料、化工产品包装的需要,我们研制了JK-20型经济型数控冲床,解决了轻工行业中利用普通冲床进行板料冲压加工生产率低、耗材多、易发生工伤事故等问题。但当在该数控冲床上冲压印花板料时,要求印花位于冲裁件中心,这样对该数控冲床的定位精度提出了较高的要求。为了解决该经济型开环数控冲床定位精度低的问题,我们分析了其定位误差产生的原因,根据冲压加工工艺特点,预先对其工作台的定位误差进行动态测定,利用软件进行定位误差补偿,提高其加工精度。
定位误差产生的原因
由功率步进电机通过丝杠驱动的工作台产生的定位误差主要有:
(1)由丝杠驱动引起的工作台x、y坐标方向全程分布随位移非线性变化的误差。这一误差在一定时间内具有相对的稳定性,但随着系统投入使用的时间增长、传动副的磨损等还会发生变化。
(2)由丝杠产生的反向间隙误差;
(3)由x、y轴导轨不垂直产生的误差;
(4)由功率步进电机失步、过冲产生的误差。引起步进电机失步和过冲的原因为:过载,起、停过程中的升降速运动不合适,静态锁定电流值小。当选择步进电机时,使系统的负载力矩不超过步进电机的矩频特性线,并留有一定余量,同时选择适当的升、降频规律和曲线与静态锁定电流,这样步进电机很少出现失步和过冲现象。因此我们只对前三项定位误差进行分析并加以补偿。
定位误差补偿
非线性位移误差补偿
由丝杠驱动引起的工作台x、y坐标方向全程分布的非线性位移误差在一定时间内是一常值误差,因此工作台安装调整好后,预先对工作台定位误差进行动态测量和处理。测量可采用感应同步器及数显装置或激光测量装置等。在加工中可根据预先测量的定位误差进行误差补偿。
由于其非线性位移误差曲线基本不变性,因此我们可根据预先测量的定位误差,按一定精度在x轴上取一系列离散点,根据离散点的误差将其补偿值(以脉冲当量为单位)建立成表格,存入计算机内存。如某点的误差为2.1个脉冲当量,我们可取补偿值为2个脉冲当量(补偿脉冲当量取误差的整数倍,即将误差值(以脉冲当量计)四舍五入取其整数)。即工作台移动到该点时,控制脉冲减少2个脉冲。这样理论上可将工作台精度控制在0.5个脉冲当量内。
根据以上补偿原理可对工作台位移逐点比较补偿,但当逐点比较补偿时,要占用微机的大量存取空间,还要有足够的运算速度,这样对由单片机开发的系统在实际应用中有一定困难。考虑到冲床冲压加工是点位控制的特点,只需要对工件定位点(冲压点)进行补偿。基于此冲压加工特点,给微机软件补偿定位误差带来了很大的方便。
当工作台在x方向送料时,假设起始点从绝对原点开始,在x1,x2,…,xk,xk+1,…冲压加工,当冲压x1点时,微机应发出的理论脉冲数为:
Lx1=X1/δ
式中δ——脉冲当量。
由于非线性位移误差的存在,当微机发出Lx1个脉冲数时,x方向送料不在x1点。查表得x1点的非线性位移误差为Ex1(以脉冲当量计),微机应发出的实际脉冲数为:
LB(X1)=Lx1-Ex1 (2)
由于x1点的误差补偿,x1点到x2点的非线性误差曲线平移成图1a中的虚线。因此在冲压x2点时,微机应发出的实际脉冲数为:
LB(X2)=(Lx2-Lx1)-(Ex2-Ex1)
=Lx2-LB(x1)-Ex2