





Hello,大家好。今天是2019年5月30日,己亥年 【猪年】 己巳月 丁卯日,是中国“五卅”运动纪念日。今天我们讨论的话题是关于数控冲床加工的那点事。
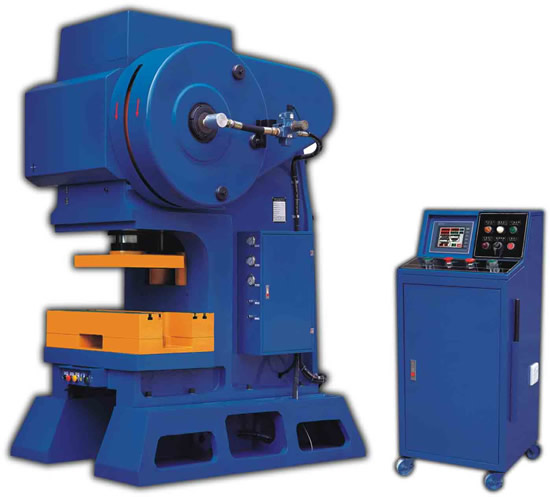
数控冲床加工的方针是完成高速度、高精度和高效率加工。如何确保在冲床运动平稳的前提下,完成以过渡过程时间最短为方针的最优加减速操控规律,使液压冲床具有满足高速加工要求的加减速特性,是加减速研究的关键问题。
加减速操控方案通常有前加减速操控和后加减速操控2种:前加减速操控一般位于插补之前、插补预处理之后,加减速操控的对象是指令进给速度;后加减速操控通常在插补器之后、伺服操控器之前,操控各运动轴的进给速度等。后加减速操控无需核算减速点,算法相对简单,但如果每个运动轴的伺服增益不同,容易造成较大的轨道概括误差,影响运动精度。
因而,目前首要使用前加减速操控技术。加减速操控方法能够归纳为传统加减速法和柔性加减速法:传统加减速法有梯形加减速法和指数加减速法等方法;柔性加减速法有三角函数加减速法、S曲线加减速法和多项式加减速法等。传统的梯形和指数加减速由于存在加速度突变而影响运动平稳性,柔性加减速由于加速度接连,在高速冲床加工中倍受重视。







